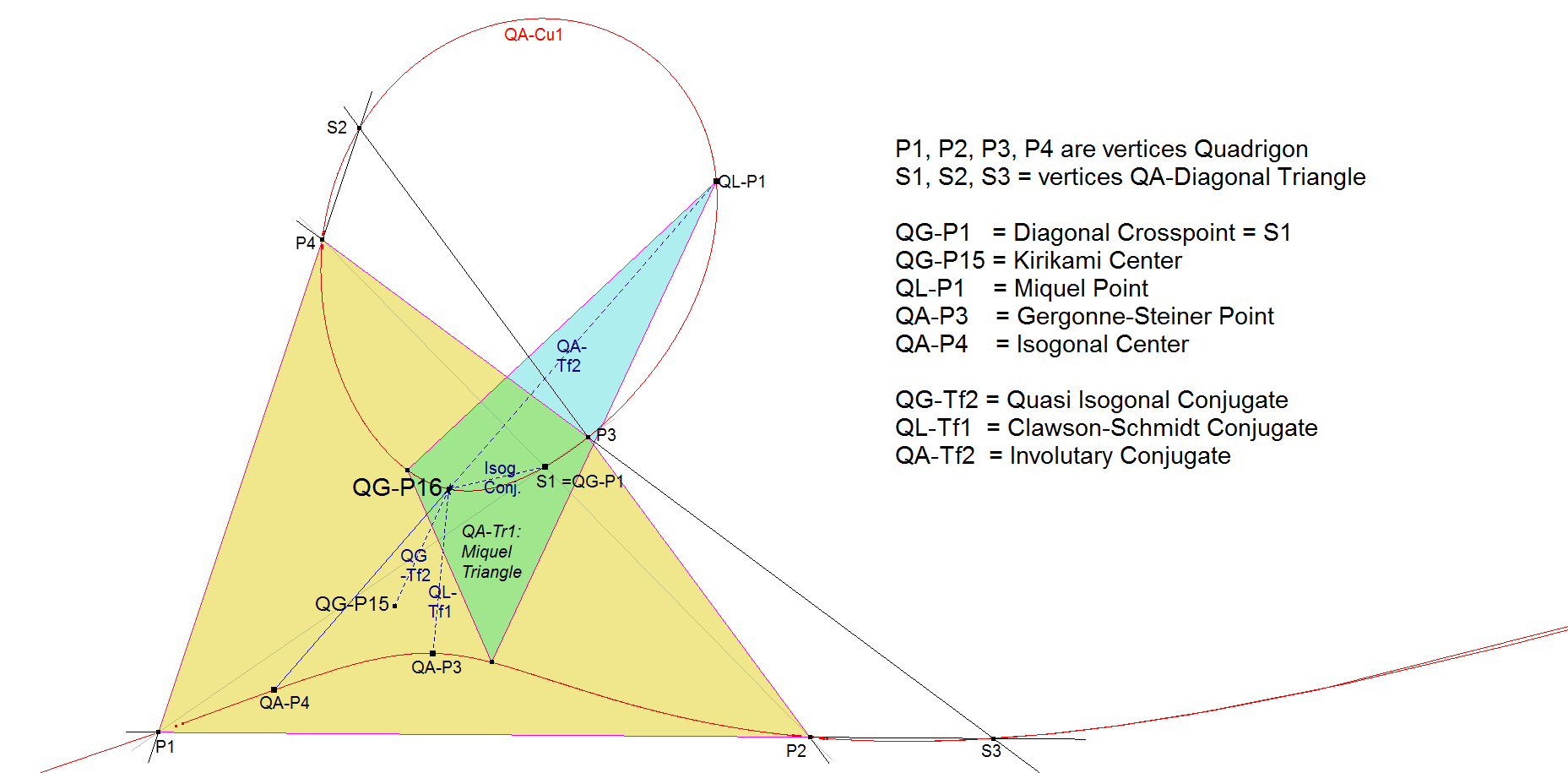
QG-P16 Schmidt Point
QG-P16 is the Involutary Conjugate (QA-Tf2) of the Miquel Point (QL-P1).
Because it is the image of a QA-Transformation wrt a QL-Point the result is a Quadrigon Point. As can be seen in the properties below it is also the image of a QL-Transformation wrt a QA-Point.
This point and most of its properties are discovered by Eckart Schmidt (November 26, 2012).
CT-Coordinates QG-P16 in 3 QA-Quadrigons
(-a2 (p + q + r) (-c2 p2 q – c2 p q2 + b2 p2 r + a2 p q r + b2 p q r – 2 c2 p q r + a2 q2 r) :
(c2 p q + b2 p r + a2 q r) (a2 p q – b2 p q + a2 q2 – b2 q2 + c2 q2 – b2 p r – b2 q r + c2 q r) :
-c2 (p + q + r) (c2 p q2 – 2 a2 p q r + b2 p q r + c2 p q r – a2 q2 r + b2 p r2 – a2 q r2))
(-(c2 p q + b2 p r + a2 q r) (a2 p2 – b2 p2 – c2 p2 + a2 p q – b2 p q + a2 p r – c2 p r + a2 q r) :
-b2 (p + q + r) (-c2 p2 q – c2 p q2 + b2 p2 r + a2 p q r + b2 p q r – 2 c2 p q r + a2 q2 r) :
-c2 (p + q + r) (c2 p2 q – b2 p2 r + a2 p q r – 2 b2 p q r + c2 p q r – b2 p r2 + a2 q r2))
(-a2 (p + q + r) (c2 p2 q – b2 p2 r + a2 p q r – 2 b2 p q r + c2 p q r – b2 p r2 + a2 q r2) :
-b2 (p + q + r) (c2 p q2 – 2 a2 p q r + b2 p q r + c2 p q r – a2 q2 r + b2 p r2 – a2 q r2) :
-(c2 p q + b2 p r + a2 q r) (c2 p q – a2 p r + c2 p r – b2 q r + c2 q r – a2 r2 – b2 r2 + c2 r2))
DT-Coordinates QG-P16 in 3 QA-Quadrigons
(p2/(b2 p4 – a2 p2 q2 – b2 p2 q2 + 2 c2 p2 q2 + a2 q4 – b2 p2 r2 – a2 q2 r2) :
1/(-a2 p2 + b2 p2 + c2 p2 + a2 q2 – b2 q2 + c2 q2 + a2 r2 + b2 r2 – c2 r2) :
r2/(-c2 p2 q2 + c2 q4 – b2 p2 r2 + 2 a2 q2 r2 – b2 q2 r2 – c2 q2 r2 + b2 r4))
( 1/(a2 p2 – b2 p2 – c2 p2 – a2 q2 + b2 q2 – c2 q2 – a2 r2 – b2 r2 + c2 r2) :
-(q2/(b2 p4 – a2 p2 q2 – b2 p2 q2 + 2 c2 p2 q2 + a2 q4 – b2 p2 r2 – a2 q2 r2)) :
-(r2/(c2 p4 – c2 p2 q2 – a2 p2 r2 + 2 b2 p2 r2 – c2 p2 r2 – a2 q2 r2 + a2 r4)))
(p2/(c2 p4 – c2 p2 q2 – a2 p2 r2 + 2 b2 p2 r2 – c2 p2 r2 – a2 q2 r2 + a2 r4) :
q2/(-c2 p2 q2 + c2 q4 – b2 p2 r2 + 2 a2 q2 r2 – b2 q2 r2 – c2 q2 r2 + b2 r4) :
1/(-a2 p2 + b2 p2 + c2 p2 + a2 q2 – b2 q2 + c2 q2 + a2 r2 + b2 r2 – c2 r2))
CT-Coordinates QG-P16 in 3 QL-Quadrigons
(-a2 (l – m) m n (a2 l2 – a2 l m – 2 b2 l m + c2 l m + 2 b2 m2 – a2 l n + 2 b2 l n – c2 l n + a2 m n – 2 b2 m n – c2 m n + c2 n2) :
-b2 l (l – m) (m – n) n (a2 l – a2 m – c2 m + c2 n) :
c2 l m (m – n) (a2 l2 – a2 l m – 2 b2 l m + c2 l m + 2 b2 m2 – a2 l n + 2 b2 l n – c2 l n + a2 m n – 2 b2 m n – c2 m n + c2 n2))
(-a2 (l – m) n (a2 l2 m – a2 l m2 – 2 b2 l m2 + c2 l m2 + 2 b2 m3 – a2 l2 n + 2 b2 l m n + a2 m2 n – 2 b2 m2 n – c2 m2 n – c2 l n2 + c2 m n2) :
-l n (a2 l – a2 m + c2 m – c2 n) (b2 l m – c2 l m – b2 m2 + a2 l n – b2 l n + c2 l n – a2 m n + b2 m n) :
-c2 l (m – n) (a2 l2 m – a2 l m2 – 2 b2 l m2 + c2 l m2 + 2 b2 m3 – a2 l2 n + 2 b2 l m n + a2 m2 n – 2 b2 m2 n – c2 m2 n – c2 l n2 + c2 m n2))
(-m (m – n) (-a2 l + a2 m – c2 m + c2 n) (a2 l2 – a2 l m – 2 b2 l m + c2 l m + 2 b2 m2 – a2 l n + b2 l n + a2 m n – b2 m n – c2 m n) :
b2 (l – m) (m – n) (-a2 l2 m + a2 l m2 + 2 b2 l m2 – c2 l m2 – 2 b2 m3 + a2 l2 n – 2 b2 l m n – a2 m2 n + 2 b2 m2 n + c2 m2 n + c2 l n2 – c2 m n2) :
-(l – m) m (a2 l – a2 m + c2 m – c2 n) (a2 l m + b2 l m – c2 l m – 2 b2 m2 – b2 l n + c2 l n – a2 m n + 2 b2 m n + c2 m n – c2 n2))
DT-Coordinates QG-P16 in 3 QL-Quadrigons
(m2 (m – n) (m + n) (-b2 l2 + c2 l2 + b2 m2 – c2 n2) (a2 l2 – a2 m2 + c2 m2 – c2 n2) :
(b2 l2 m2 – c2 l2 m2 – b2 m4 – a2 l3 n + a2 l m2 n + c2 l m2 n + a2 l2 n2 – b2 l2 n2 + c2 l2 n2 – a2 m2 n2 + b2 m2 n2 – c2 l n3) (b2 l2 m2 – c2 l2 m2 – b2 m4 + a2 l3 n – a2 l m2 n – c2 l m2 n + a2 l2 n2 – b2 l2 n2 + c2 l2 n2 – a2 m2 n2 + b2 m2 n2 + c2 l n3) :
m2 (-l + m) (l + m) (-a2 l2 + b2 m2 + a2 n2 – b2 n2) (-a2 l2 + a2 m2 – c2 m2 + c2 n2))
(-a2 (l – m) (l + m) n (b2 l2 m2 – c2 l2 m2 – b2 m4 + a2 l3 n – a2 l m2 n – c2 l m2 n + a2 l2 n2 – b2 l2 n2 + c2 l2 n2 – a2 m2 n2 + b2 m2 n2 + c2 l n3) :
l n (l + n) (a2 l2 – a2 m2 + c2 m2 – c2 n2) (a2 l2 – a2 m2 – c2 m2 + c2 n2) :
c2 l (m – n) (m + n) (-b2 l2 m2 + c2 l2 m2 + b2 m4 – a2 l3 n + a2 l m2 n + c2 l m2 n – a2 l2 n2 + b2 l2 n2 – c2 l2 n2 + a2 m2 n2 – b2 m2 n2 – c2 l n3))
(-a2 (l – m) (l + m) n (-b2 l2 m2 + c2 l2 m2 + b2 m4 + a2 l3 n – a2 l m2 n – c2 l m2 n – a2 l2 n2 + b2 l2 n2 – c2 l2 n2 + a2 m2 n2 – b2 m2 n2 + c2 l n3) :
-l (l – n) n (a2 l2 – a2 m2 + c2 m2 – c2 n2) (a2 l2 – a2 m2 – c2 m2 + c2 n2) :
c2 l (m – n) (m + n) (-b2 l2 m2 + c2 l2 m2 + b2 m4 + a2 l3 n – a2 l m2 n – c2 l m2 n – a2 l2 n2 + b2 l2 n2 – c2 l2 n2 + a2 m2 n2 – b2 m2 n2 + c2 l n3))
Properties
- QG-P16 is the Isogonal Conjugate of QG-P1 wrt the Miquel Triangle (QA-Tr2).
- QG-P16 is the QA-Tf2 image (Involutary Conjugate) of QL-P1.
- QG-P16 is the QL-Tf1 image (Clawson-Schmidt Conjugate) of QA-P3.
- QG-P16 is the QG-Tf2 image (Quasi Isogonal Conjugate) of QG-P15.
- QG-P16 is collinear with QL-P1, QA-P4.
- QG-P16 is the perspector of the Miquel triangle and the triangle formed by QA-P4 and the QA-Tr1-vertices unequal QG-P1.
- QG-P16.QG-P1 is parallel with QA-L4.
- QG-P16 lies on QA-Cu1 and the asymptote of QA-Cu1 is parallel to QG-P16.QG-P1.
- The three QG-P16 points of a quadrilateral are collinear on QL-L11, which is the QL-Tf1 image of the Dimidium circle QL-Ci6.
- The QA-Möbius Conjugate (QA-Tf4) of QG-P16 is a point on the line QA-P4.QG-P5.
- QG-P16 lies on the polar of QL-P1 wrt QG-Co2 (and invers) (Eckart Schmidt, October 9, 2013). See [34], QFG # 286.
- The Triple Triangle of QG-P16 is perspective with all QA-Component Triangles (see QA-Tr-1 for Desmic Triple Triangles).
Estimated human page views: 876